





■多関節ロボット導入サポート
初めてロボットアームの導入を検討しているお客様へのサポートサービスです。
ロボットの使用用途は多岐的に渡ります。
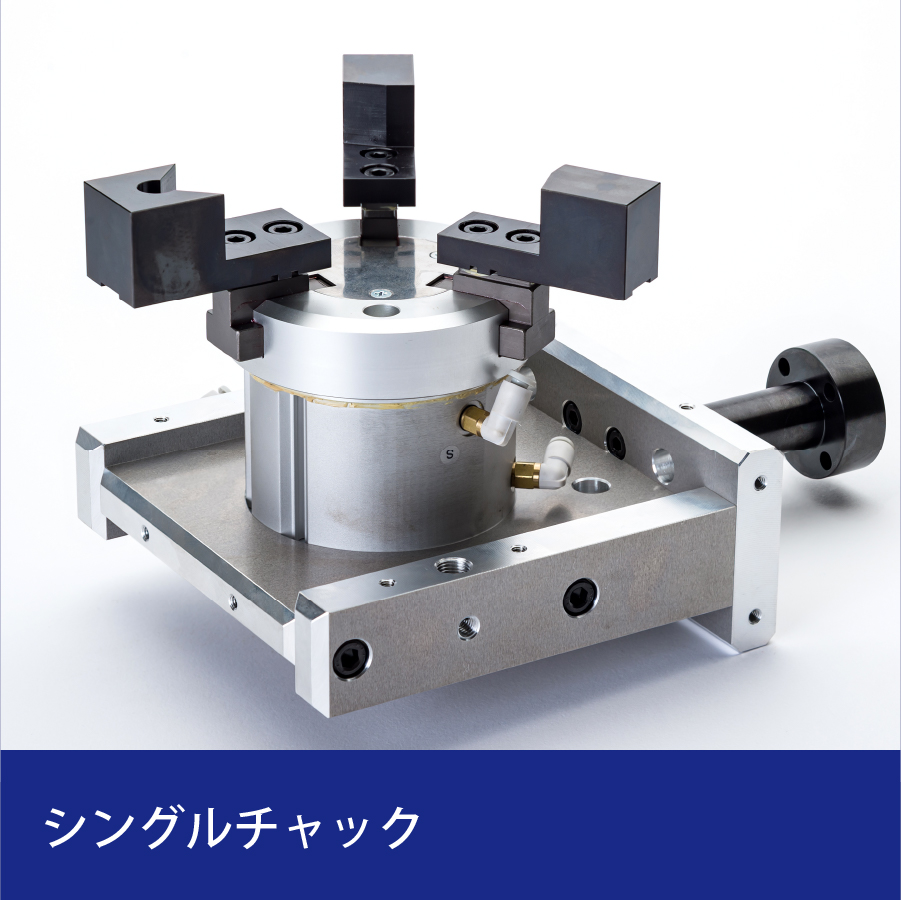
反面、ロボットアームメーカーはアームの先のエフェクター(ロボットハンドなど)やアタッチメントは自社で用意することが一般的です。
当社は30年以上に渡り、ロボットと共存しものづくりに携わって参りました。
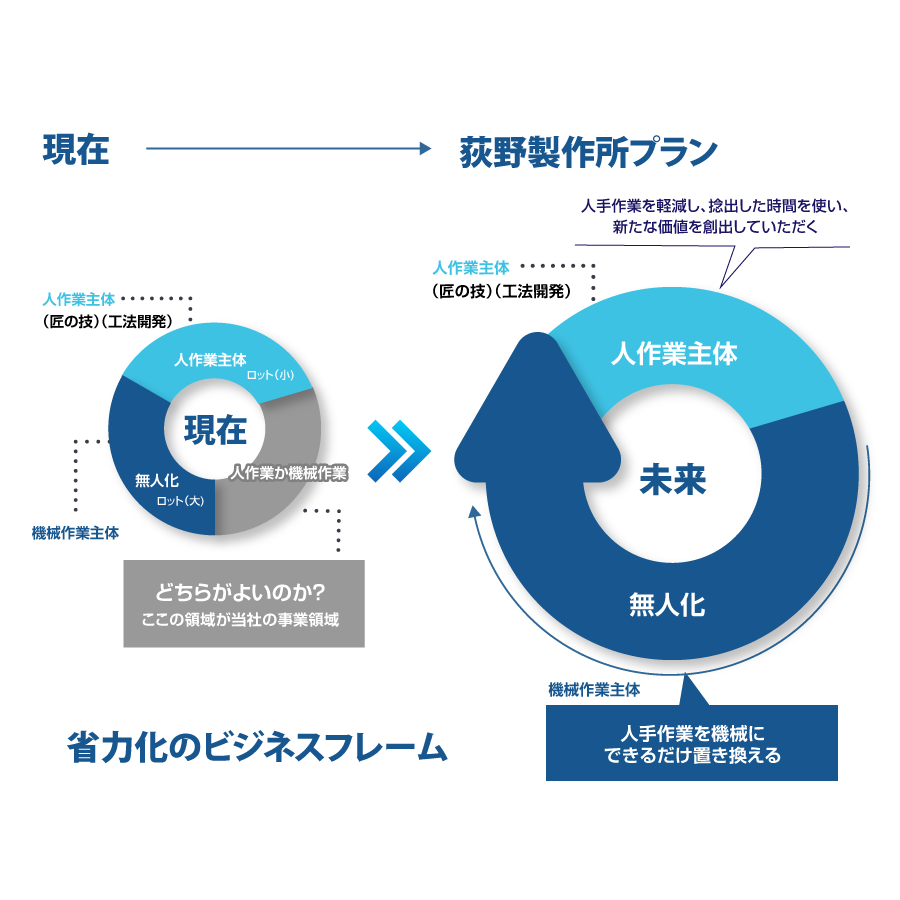
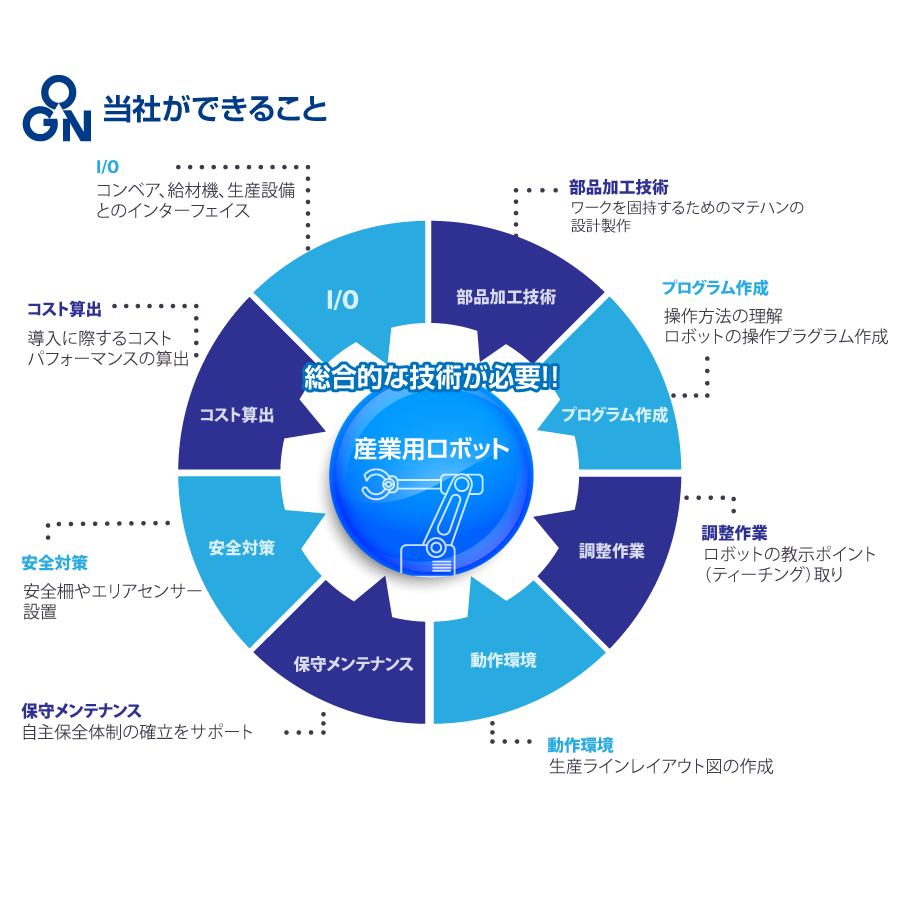
そのノウハウを活かし、お客様が必要な部分の設計・製作、操作指導などを請負い、省人化・省力化の後方支援を行うビジネスを始めました。
反面、ロボットアームメーカーはアームの先のエフェクター(ロボットハンドなど)やアタッチメントは自社で用意することが一般的です。
当社は30年以上に渡り、ロボットと共存しものづくりに携わって参りました。
そのノウハウを活かし、お客様が必要な部分の設計・製作、操作指導などを請負い、省人化・省力化の後方支援を行うビジネスを始めました。
■オリジナル省力化装置とIOTの結合事例
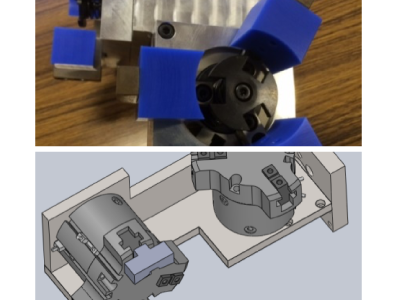
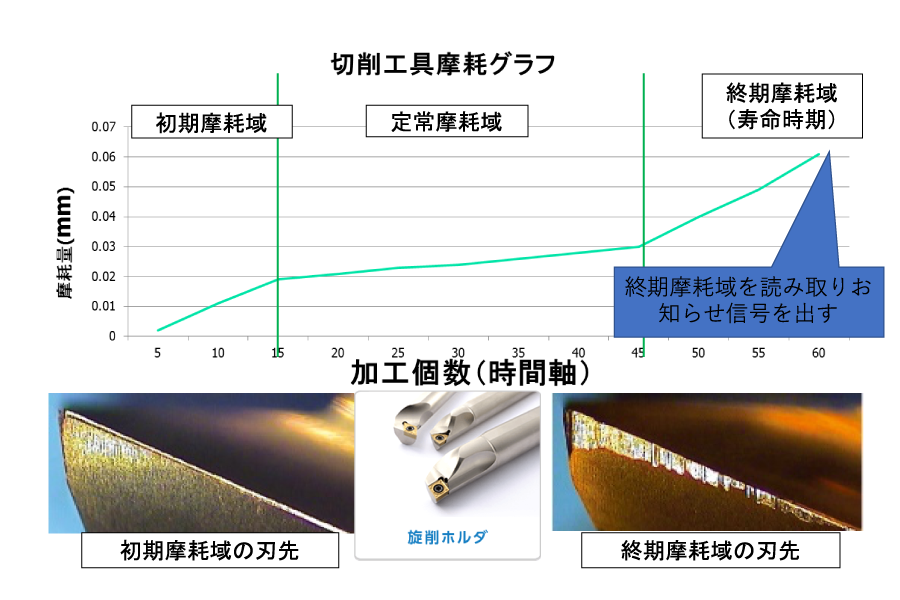
はかーるちゃん(自社オリジナル段差測定装置)の検査データを自動解析し、工具の寿命を導き出すことができました。
はかーるちゃん(自社オリジナル段差測定装置)の解析機能追加を行いました。
測定値のしきい値や変化量の法則性を事前に登録しておくことで、異常が発生した際に、モニターや携帯電話にお知らせを送る機能を追加しました。
これにより消耗品の摩耗管理や治具や工具破損などの履歴がすべて残ります。
さらに手順書とデータリンクさせることでトラブルシューティングを行う時にも便利です。

■オリジナル省力化装置とIOTの結合事例
■NC制御器のデータを一元管理に挑戦
工作機械への指令履歴を自動抽出し、工程の確からしさ検証やヒューマンエラー解析にも役立てることができました。
複数のNC制御機器メーカーのデータを一元的に管理できるようにPLCをもう一台途中経由させ同じ切り口でメーカー関係なく独自にデータ管理ができるような工法開発に取り組みました。
これによりNCに入力した指令コマンド(起動、停止履歴、工具補正入力値、アラーム発生とその解除履歴)を自動的に抽出できる仕組みを構築しました。
その成果として生産性(稼働率、停止時間管理)、作業者の習熟度チェック(補正回数や補正入力量)、設備異常発生時に何を行ったか(復旧手順の遡り)を容易に把握できるようになりました。
また、生産ラインが安定状態を定量判断できるようになり、現場でおきた問題点を共有することもできるようになりました。
これによりNCに入力した指令コマンド(起動、停止履歴、工具補正入力値、アラーム発生とその解除履歴)を自動的に抽出できる仕組みを構築しました。
その成果として生産性(稼働率、停止時間管理)、作業者の習熟度チェック(補正回数や補正入力量)、設備異常発生時に何を行ったか(復旧手順の遡り)を容易に把握できるようになりました。
また、生産ラインが安定状態を定量判断できるようになり、現場でおきた問題点を共有することもできるようになりました。

■移動可能給材ロボットの開発
給材ロボットに高精度カメラを結合し原点自動キャリブレーションが可能となりました。
今回の開発はロボットを導入すると省力化が図れ、生産効率は上がるが、人作業の側面(段取り変え、機械調整・修理)では設備前にアンカー固定されたロボットが邪魔で作業性が著しく低下するので、人作業が行なわれるときはロボットを機械前から離したいというコンセプトから始まりました。
まずは材料給材機と着脱ロボットユニット、搬出コンベアを一体化させ、そこに車輪をつけ、ロボットが移動できるようにし、さらに高精度カメラを搭載しました。
カメラで機械と一体型ロボットの位置関係を撮像し、カメラの検出範囲内であれば自動的に各座標原点をキャリブレーションしてくれるので、都度面倒なティーチング作業がなくなり、人の作業性を損なわずに済むようになりました。
まずは材料給材機と着脱ロボットユニット、搬出コンベアを一体化させ、そこに車輪をつけ、ロボットが移動できるようにし、さらに高精度カメラを搭載しました。
カメラで機械と一体型ロボットの位置関係を撮像し、カメラの検出範囲内であれば自動的に各座標原点をキャリブレーションしてくれるので、都度面倒なティーチング作業がなくなり、人の作業性を損なわずに済むようになりました。